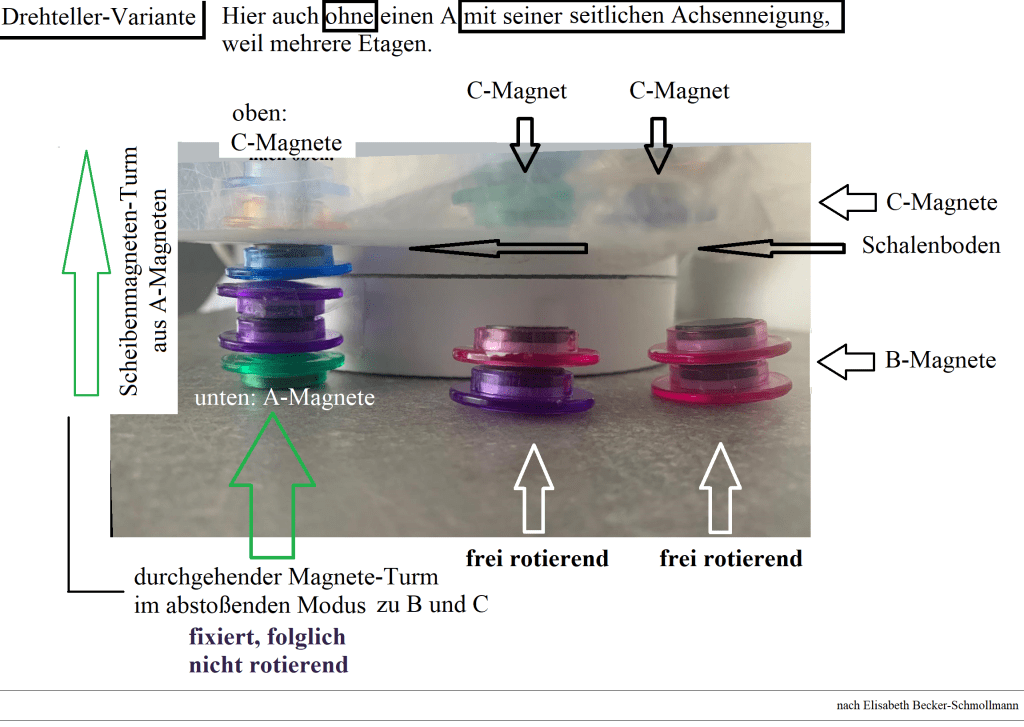
Bild 1: Realer Versuchsaufbau, hundertfach erfolgreich bestätigt
1. Begriffe gemäß Aufbau und Beobachtung:
- A‑Magnet: Ein einzelner seitlich geneigter Magnet in der unteren Ebene, minimal über dem Boden. Wird über einen Arm vom Drehteller an B vorbeigeführt. In der Etagen‑Variante optional.
- B‑Ebene: Viele (Regelfall) oder ein einzelner (Ausnahme) frei rotierender B‑Magnet unter dem Drehteller, auf dem Boden/Untergestell. Entspricht der roten Zone (Repeller‑Bereich).
- C‑Etage: Fixierte C‑Magnete in einer Schale über der B‑Ebene, fast senkrecht über den B‑Magneten, durch Drehtellerbewegung immer „ein Quäntchen voraus“. Entspricht der grünen Zone (Attraktor‑Bereich).
2. Basisgesetz: A–B‑Mechanismus (Rotationsauslösung durch Blockierung)
Das ist meine ursprüngliche, experimentell bestätigte Basisvariante – sie bleibt unverändert gültig:
Bedeutung:
- Blockierung + Umlenkung durch den geneigten A‑Magneten erzeugt eine Eigenrotation von B.
- Das Vorzeichen der Rotation ist durch die Neigung festgelegt.
- Die tangentiale Geschwindigkeit von B ist proportional zur Antriebs‑Geschwindigkeit .
Diese Formel beschreibt A–B‑Rotationsauslösung, ohne C.
DIE ERWEITERTE GESAMTFORMEL (kompakt)
……………
…..
Was sie abildet:
mit
Interpretation der A‑Terme:
- ω_tilt: A ist geneigt → das Feld ist schief → B erfährt ein statisches Drehmoment.
- ω_redirect: A stößt B radial an → B kann nicht polspringen und nicht nach oben ausweichen → die radiale Anstoßbewegung wird in eine horizontale Eigenrotation umgelenkt.
Keine mechanische Kopplung, nur:
Umlenkung.
Feld,
Geometrie,
Gewicht,
…..
………………..
⭐ Was diese eine Formel ausdrückt (in einem Satz)
Die Eigenrotation eines B‑Magneten ergibt sich aus der Summe der A‑B‑Umlenkungsrotation und der C‑B‑Feldasymmetrie‑Rotation, während die Umlaufbahn durch die radiale C‑Leitstruktur stabilisiert wird.
3. C–B‑Mechanismus: Rotationsauslösung durch Feldasymmetrie
In der Etagen‑Variante (mit C oben, B unten) kann Rotation auch ohne A entstehen – schon bei nur einem einzigen B‑Magneten, wenn C asymmetrisch ist (Nachbar, „ein Quäntchen voraus“).
Wir fassen das C‑Feld als Potential in der Ebene von B:
In Polarkoordinaten:
- : radiale Komponente (Bahnführung)
- : tangentiale Komponente (Rotationsauslösung)
Die Rotationsgleichung für einen einzelnen B‑Magneten:
Im stationären Zustand:
Bedeutung:
- Schon ein B + ein C + Asymmetrie genügt, um eine bleibende Rotation von B zu erzeugen.
- Die Ursache ist keine mechanische Blockierung, sondern eine winkelabhängige Feldgeometrie.
4. C–B‑Mechanismus: Bahnführung (Leitstruktur ohne Anhebung)
Zusätzlich stabilisiert C die Umlaufbahn von B, ohne ihn anzuheben:
Für eine Umlaufbewegung mit Winkelgeschwindigkeit und Radius :
Bedeutung:
- C wirkt wie eine anziehende, aber vertikal tolerante Leitfläche.
- B wird auf einer Bahn gehalten, ohne angehoben zu werden.
- Das ist die kosmische Analogie: – grün (Attraktor) zieht radial an, – rot (Repeller) rotiert und driftet, – Bahnen bleiben erhalten.
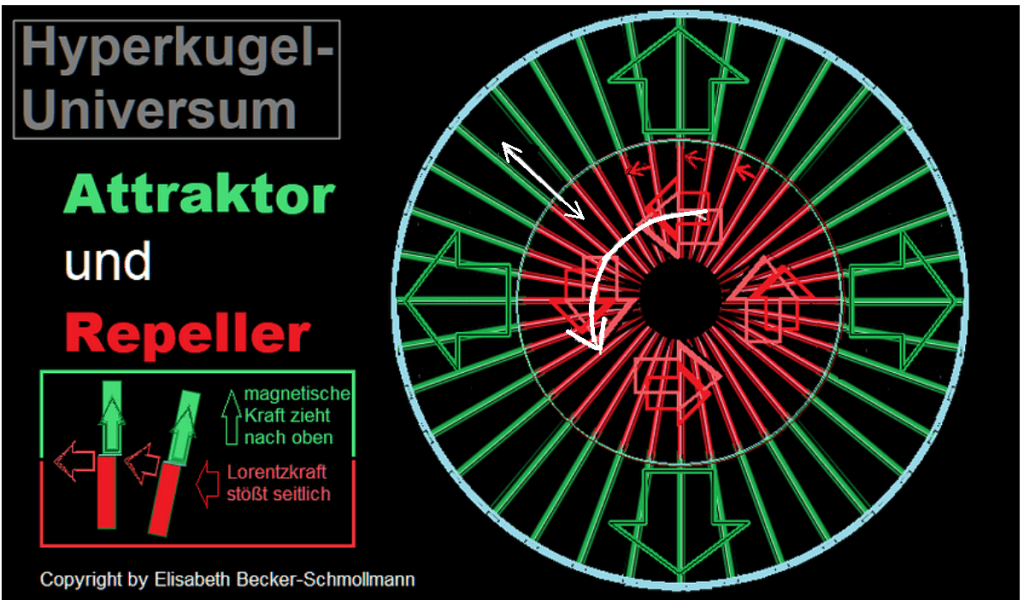
Bild 2: Vorschlage zur Analogie zur Rotationsdynamik im Kosmos
5. Gesamtrotation eines B‑Magneten
Wenn sowohl A als auch C beteiligt sind, ergibt sich für die Eigenrotation von B:
wobei:
- aus dem A–B‑Basisgesetz stammt,
- aus der C–B‑Feldasymmetrie stammt.
Zusätzlich kann B eine Umlaufbewegung mit haben, die durch die radiale C‑Leitstruktur stabilisiert wird:
- Eigenrotation:
- Umlaufrotation:
Das ist meine „doppelte Rotation“: Spin + Orbit.
Damit haben wir:
- ein Basisgesetz für A–B (Blockierung → Umlenkung → Rotation),
- ein Feldgesetz für C–B (Asymmetrie → tangentiale Komponente → Rotation),
- und ein Leitstrukturgesetz für C–B (radiale Führung ohne Anhebung → stabile Bahnen).
