
Rotationsauslösung – Entdeckung experimentell an einem Drehtellermodell demonstriert
1. Masterformel der Gesamtrotation
Diese Formel beschreibt die Überlagerung zweier Rotationsanteile des B‑Magneten:
- Eigenrotation um die eigene Dipolachse
- Bahnrotation entlang der durch A vorgegebenen Bahn – beim Drehteller: scheinbare Kreisbahn – beim Laufband: lineare Driftbahn
Die Gewichtung beider Rotationsmodi wird durch die seitliche Achsneigung bestimmt. Die Bahnweite und Bahnrichtung werden zusätzlich durch die Vorwärts‑ oder Rückwärtsneigung modifiziert.
2. Geometrische Bedingungen für die Rotationsauslösung
2.1 Neigungsbedingung des A‑Magneten
Innerhalb dieses Winkelbereichs entsteht eine stabile asymmetrische Abstoßung, die die Driftbewegung und damit die Rotation des B‑Magneten ermöglicht.
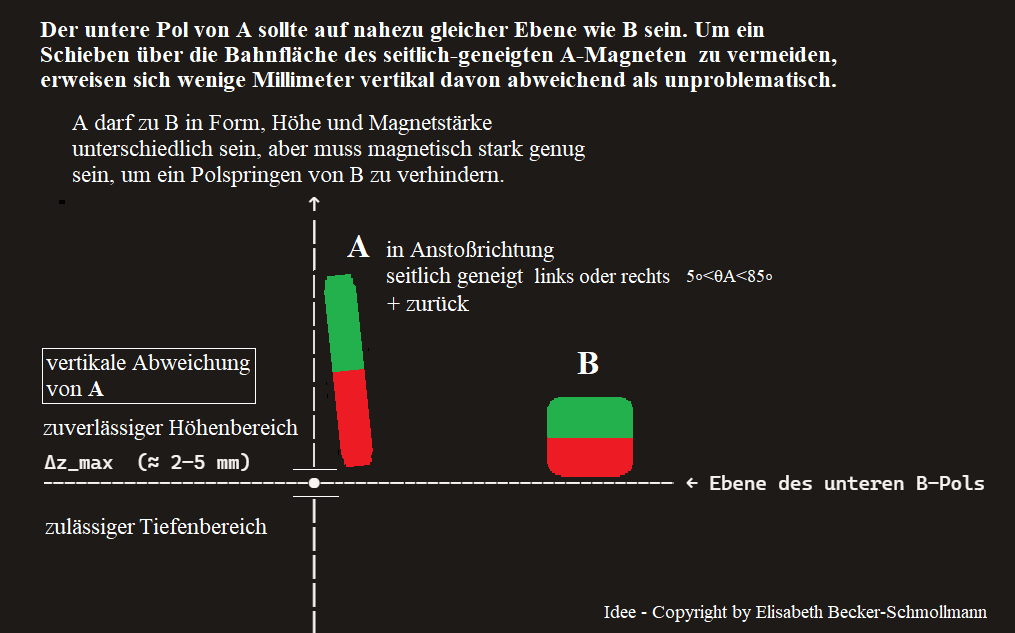
2.2 Höhenbedingung des unteren Pols von A
Die Rotation bleibt nur stabil, wenn der untere Pol des seitlich geneigten A‑Magneten die gemeinsame Ebene mit dem unteren Pol des B‑Magneten höchstens um wenige Millimeter nach oben verlässt. Experimentell liegt dieser Toleranzbereich bei:
Innerhalb dieses engen vertikalen Fensters wirkt die Abstoßung stabil horizontal. Wird die obere Grenze überschritten, verliert der B‑Magnet seine Blockierung und kippt in den anziehenden Modus.
Der A‑Magnet kann:
- auf der gemeinsamen Ebene geführt werden,
- knapp darüber (optimal),
- wenige Millimeter darunter (z. B. an einer Tischkante).
Mehrere B‑Magnete können gleichzeitig von einem A‑Magneten angestoßen werden, solange die Höhenbedingung erfüllt bleibt.
3. Eigenrotation des B‑Magneten
Die seitliche Neigung des A‑Magneten bestimmt die Richtung der horizontalen Eigenrotation des B‑Magneten:
- A rechts geneigt → B rotiert links herum
- A links geneigt → B rotiert rechts herum
Diese gegenläufige Beziehung entsteht, weil B versucht, sich auf der höherliegenden Seite anzuheben, die 180°‑Drehung jedoch blockiert ist und in eine horizontale Rotation umgelenkt wird.
4. Bahnführung des B‑Magneten
Die Bahn des B‑Magneten ergibt sich aus der Überlagerung zweier Neigungskomponenten des A‑Magneten:
- seitliche Neigung (schwach bis stark)
- Vorwärts‑ oder Rückwärtsneigung (nur in kleinem Winkelbereich wirksam)
4.1 Einfluss der Vorwärts-/Rückwärtsneigung auf die Bahnweite
Bei schwacher Seitenneigung:
- seitlich + vorne → Bahn sehr eng
- seitlich + hinten → Bahn öffnend, weiter
Bei starker Seitenneigung:
- seitlich + vorne → Bahn eng
- seitlich + hinten → Bahn ebenfalls eng
Grund: Die vertikale Komponente der Abstoßkraft zieht B stärker „unter“ A und verengt die Bahn.
4.2 Kombination aus Seitenneigung und Vor-/Rückneigung bestimmt die Bahnrichtung
A stark nach links geneigt:
- links + vorne → Bahn sehr eng, Richtung links herum
- links + hinten → Bahn sehr eng, Richtung rechts herum
A stark nach rechts geneigt (Spiegelbild):
- rechts + vorne → Bahn sehr eng, Richtung rechts herum
- rechts + hinten → Bahn sehr eng, Richtung links herum
Die engen Bahnen erzeugen den Eindruck einer Rotation um A. Da A jedoch bahnführend wirkt, kann A nicht gleichzeitig Bahnmittelpunkt sein. Bei zu enger Bahn haftet B leicht an A an.
4.3 Nur seitliche Neigung (ohne Vor-/Rückneigung)
- starke Seitenneigung → Bahn weit, teilweise nahezu linear
- schwache Seitenneigung → Bahn eng
Die Bahnweite folgt direkt aus der seitlichen Achsneigung .
5. Gesamtzusammenhang
Die seitliche Neigung des A‑Magneten bestimmt die Richtung der horizontalen Eigenrotation des B‑Magneten. Die zusätzliche Vorwärts‑ oder Rückwärtsneigung bestimmt die Bahnweite und kann die Bahnrichtung verstärken oder umkehren. Beide Neigungen überlagern sich und erzeugen das vollständige Bahnverhalten des rotierenden B‑Magneten.
Die sauberste mathematische Darstellung lautet:
mit der Höhenbedingung:
Symbolerklärung
- — seitliche Neigung des A‑Magneten; bestimmt Eigenrotation und Grundbahnweite
- — Vorwärts-/Rückwärtsneigung; modifiziert Bahnweite und Bahnrichtung
- — Bahnweiten‑Modifikator
Qualitativ gilt:
- → Bahn enger
- → Bahn unverändert
- → Bahn weiter
- → Bahnrichtung kehrt sich um
Damit bildet die Formel alle Beobachtungen aus dem Drehteller‑Experiment korrekt ab.
Postulat
Die beschriebenen Mechanismen legen nahe, dass sich gewünschte Bahnen für Magnetrotoren und Rotationssysteme auch auf atomarer Ebene — überall dort, wo Dipole eine Rolle spielen — modellhaft bestimmen und berechnen lassen.
Grafische Interpretation der Masterformel
Die Masterformel beschreibt die Gesamtrotation des B‑Magneten als Vektor, der aus zwei orthogonalen Rotationsrichtungen zusammengesetzt ist. Diese beiden Richtungen entstehen durch die geometrische Lage des A‑Magneten und die daraus resultierende Driftkraft.
1. Zwei orthogonale Rotationsrichtungen
Die Rotation des B‑Magneten findet in einem zweidimensionalen Rotationsraum statt, der durch zwei senkrecht zueinander stehende Richtungsvektoren aufgespannt wird:
- : Tangentialrichtung der Eigenrotation (Rotation um die eigene Dipolachse)
- : Tangentialrichtung der Bahnbewegung (Rotation entlang der durch A vorgegebenen Driftbahn)
Diese beiden Richtungen bilden ein orthogonales Koordinatensystem für die gesamte Rotationsbewegung.
2. Projektion der Rotation auf die Eigenachse
Die seitliche Neigung des A‑Magneten legt fest, wie stark der Rotationsvektor in Richtung der Eigenrotation zeigt. Mathematisch wird dieser Anteil durch den Faktor
bestimmt. Je stärker A seitlich geneigt ist, desto größer wird die Projektion auf die Eigenrotationsrichtung.
3. Projektion der Rotation auf die Bahnrichtung
Die Bahnrotation entsteht aus der seitlichen Driftbewegung des B‑Magneten. Ihr Grundanteil wird durch
bestimmt. Dieser Anteil wird zusätzlich durch die Vorwärts‑ oder Rückwärtsneigung des A‑Magneten modifiziert. Die Modifikation erfolgt über die Funktion
die die Bahnweite und Bahnrichtung verändert.
4. Konstruktion des Gesamtrotationsvektors
Der Gesamtrotationsvektor ergibt sich aus der Vektorsumme:
- einer Komponente entlang der Eigenrotationsrichtung
- einer Komponente entlang der Bahnrotationsrichtung
Die beiden Komponenten werden entsprechend ihrer Winkelgewichtung skaliert und anschließend addiert. Das Ergebnis ist ein Rotationsvektor, der sowohl die Eigenrotation als auch die Bahnrotation enthält.
5. Einfluss der Driftkraft
Der Betrag des Gesamtrotationsvektors wird durch die seitliche Driftkraft bestimmt:
Diese Kraftkomponente ist die Ursache der Rotation und legt fest, wie schnell sich der B‑Magnet insgesamt dreht. Sie wirkt unabhängig von der Richtung der Rotation und skaliert den gesamten Vektor.
6. Räumliche Bedeutung
Die grafische Interpretation zeigt:
- Die Rotation des B‑Magneten ist keine einfache Kreisbewegung, sondern eine überlagerte Doppelrotation.
- Die Richtung der Gesamtrotation ergibt sich aus der geometrischen Lage des A‑Magneten.
- Die Bahnweite und Bahnrichtung werden durch die Vorwärts-/Rückwärtsneigung bestimmt.
- Die Driftkraft legt die Rotationsgeschwindigkeit fest.
- Die Formel beschreibt die Rotation als Vektor im Raum, nicht als reine Winkelgröße.
Damit wird die räumliche Struktur der Bewegung sichtbar und die Mechanik der Doppelrotation verständlich.
1. Anforderungen an
Aus deinen Beobachtungen folgt für :
- Keine Vor-/Rückneigung → Bahnweite nur durch bestimmt.
- Vorwärtsneigung () → Bahn enger →
- Rückwärtsneigung () → Bahn kann weiter oder enger werden, je nach Bereich → kann größer, gleich oder kleiner 1 sein.
- Richtungswechsel der Bahn → muss das Vorzeichen wechseln können → bedeutet: Bahnrichtung kehrt sich um.
2. Eine mögliche glatte Modellfunktion für
Als modellhafte, glatte Funktion, die all das leisten kann, eignet sich zum Beispiel:
mit Parametern:
- : bestimmt, wie schnell die Bahn enger wird
- : Vor-/Rückneigungswinkel, bei dem die Bahnrichtung umschlägt
3. Verhalten dieser Funktion
- Bei :
→ stimmt mit der Beobachtung überein.
- Für kleine : , also
→ Bahn wird enger (), egal ob leicht vorwärts oder leicht rückwärts geneigt.
- Bei :
→ Bahnkomponente verschwindet, Übergangspunkt vor Richtungswechsel.
- Für : wird negativ →
→ Bahnrichtung kehrt sich um.
Die genauen Werte von und können später experimentell kalibriert werden.
4. Kurzfassung für deinen Text
Eine mögliche glatte Modellfunktion für den Bahnweiten‑Modifikator lautet:
wobei die Stärke der Bahnverengung und den Vor-/Rückneigungswinkel angibt, bei dem die Bahnrichtung umschlägt. Für gilt , bei moderater Vor-/Rückneigung wird die Bahn enger (), und für kehrt sich die Bahnrichtung um ().
