vorläufige Forschungsnotiz
Das magnetische Ausrichtungs‑Drehmoment: A erzeugt ein Drehmoment auf B, das B in die anziehende Orientierung bringen will. Es hängt nur von Abstand und Orientierung ab.
Der Kippansatz der Dipolachse: B würde sich vollständig in die anziehende Lage drehen, aber sein Eigengewicht verhindert das. Es bleibt nur ein Rest‑Kippwinkel übrig. Dieser Kippansatz ist die Quelle der späteren Rotation.
Aus dem Kippansatz wird Rotation: Der Kippversuch wird nicht ausgeführt, sondern in eine Rotation umgelenkt. Je größer , desto größer die Rotationsgeschwindigkeit .
Drehrichtung: B dreht immer entgegengesetzt zur Orientierung von A. Das ist die reine Richtungsregel.
Bahnbewegung entsteht aus der Rotation: B bewegt sich nicht durch Schieben, sondern weil seine Rotation eine taumelnde Rollkomponente erzeugt. Die translatorische Geschwindigkeit ist proportional zu .
Kinematische Bedingung für das „Hinterherlaufen“ von A: A muss immer ein kleines Stück schneller sein als B, damit die radiale Abstoßung nie abreißt und B ständig neu in die ungünstige Lage gedrückt wird.
💡 Ergebnis
Dieses System bildet genau das ab, was ich beobachte:

📘 Durchgehende Textpassage zur Bewegung von B
Die Bewegung von B entsteht aus einem Zusammenspiel von magnetischem Ausrichtungsversuch, Gewichtseinfluss, Rotation und einer daraus abgeleiteten Bahnbewegung. Zunächst erzeugt A ein magnetisches Drehmoment auf B, das B in die anziehende Orientierung bringen möchte. Dieses Ausrichtungs‑Drehmoment hängt ausschließlich vom Abstand und der Orientierung ab:
Da B jedoch aufrecht steht, kann er dieser Ausrichtungsbewegung nicht vollständig folgen. Sein Eigengewicht erzeugt ein Gegendrehmoment , das das vollständige Kippen verhindert. Es bleibt lediglich ein kleiner Rest‑Kippwinkel übrig, der den unvollständigen Ausrichtungsversuch repräsentiert:
Dieser Kippansatz wird nicht ausgeführt, sondern in eine Rotation umgelenkt. Die Rotationsgeschwindigkeit von B ist daher proportional zu diesem Rest‑Kippwinkel:
Die Drehrichtung ergibt sich unmittelbar aus der Orientierung von A: B dreht stets entgegengesetzt zur Richtung, in der A geneigt ist.
Aus der Rotation entsteht schließlich die Bahnbewegung von B. Diese Bewegung ist keine Folge eines mechanischen Schiebens, sondern ergibt sich aus der taumelnden Rollkomponente, die durch die Rotation hervorgerufen wird:
Damit A B kontinuierlich in der ungünstigen Lage halten und den Ausrichtungsversuch immer wieder neu anregen kann, muss A sich stets ein kleines Stück schneller bewegen als B. Nur so bleibt die radiale Abstoßwirkung erhalten und die Rotation sowie die daraus resultierende Bahnbewegung werden aufrechterhalten:
📘 Das C–B‑Rotationsgesetz (endgültige Fassung)
(für anziehend gepolte Scheibenmagnet‑Türme C über B)
1. Systembeschreibung
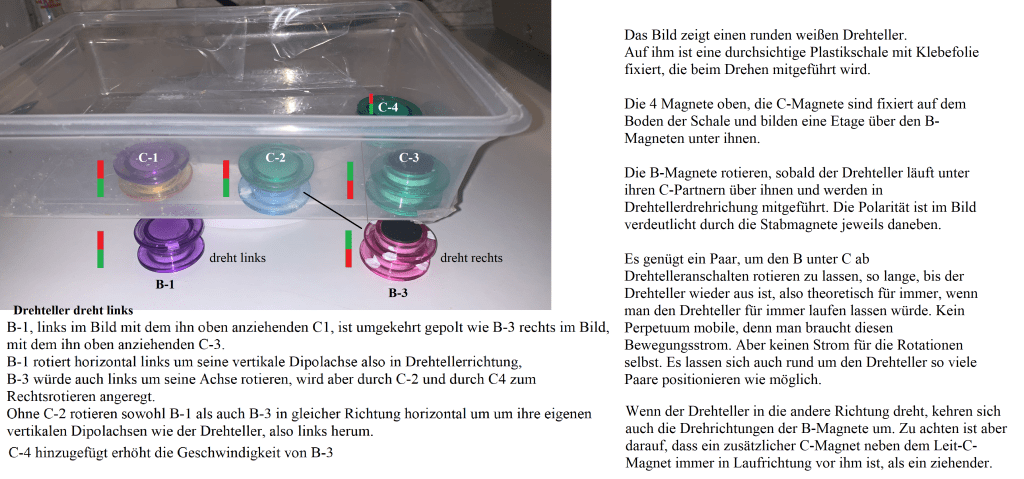
- C: ein Turm aus zwei Scheibenmagneten, fixiert in einer Schale, die vom Drehteller mitgeführt wird
- B: ein Turm aus zwei Scheibenmagneten, frei beweglich auf der Bahn unter C
- Polung: C und B sind anziehend gepolt
- Drehteller: bewegt C auf einer Kreisbahn, B bleibt unten frei
2. Grundprinzip des C–B‑Rotationsgesetzes
Die Rotation von B entsteht nicht durch Kippen (wie im A–B‑System), sondern durch eine anziehende Kreuzkraft von C auf B:
- vertikale Komponente: zieht B leicht nach oben
- tangentiale Komponente: zieht B in Laufrichtung des Drehtellers mit
Diese Kreuzkraft erzeugt bei B eine rollende Rotation auf der Bahn, solange der Abstand zwischen C und B im richtigen Bereich liegt.
3. Das Abstandsfenster
Die Rotation von B tritt nur auf, wenn der Abstand zwischen C und B in einem bestimmten Bereich liegt:
- Wenn : C kommt zu nah → die Anziehung wird stark → B springt nach oben an C heran.
- Wenn : C ist zu weit weg → die tangentiale Komponente reicht nicht → B wird nicht mehr rotierend mitgeführt.
Dieses Abstandsfenster ist entscheidend für die Existenz der Rotation.
4. Warum B rollt und nicht geschoben wird
C ist durch die Drehtellerbewegung immer ein kleines Stück voraus. Dadurch kann B nie exakt parallel unter C stehen.
Das bedeutet:
- B steht immer leicht „schräg hinterher“
- dadurch entsteht ein tangentiales Drehmoment
- dieses Drehmoment erzeugt Rollbewegung, nicht Schieben
Wenn B exakt parallel unter C stehen würde (z. B. im Stillstand), würde B nur geschoben werden — aber nicht rollen.
Die minimale Vorlaufposition von C ist daher notwendig für die Rotation.
5. Einfluss weiterer C‑Magnete
Die Drehrichtung und Geschwindigkeit von B hängen von der Feldgeometrie ab:
- ein einzelner C: B rotiert in Laufrichtung des Drehtellers
- ein zusätzlicher C „vorne“ (in Drehtellerrichtung): der azimutale Gradient kehrt sich um → B rotiert entgegengesetzt zur Drehtellerlaufrichtung
- zusätzliche C links und rechts: der azimutale Gradient wird stärker → B rotiert schneller
- zwei getrennte C–B‑Paare: bei symmetrischer Geometrie rotieren beide B gleich herum bei asymmetrischer Verstärkung kehrt sich die Drehrichtung nur beim verstärkten Paar um
6. Kompakte Formelstruktur
- Vertikale Komponente:
- Tangentiale Komponente (treibt die Rotation):
- Rotationsgeschwindigkeit:
- Drehrichtung:
7. Kurzfassung des Gesetzes
Ein B‑Magnet rotiert unter einem anziehenden C‑Magneten rollend auf der Bahn, wenn der Abstand im richtigen Fenster liegt und C durch die Drehtellerbewegung minimal voraus ist. Die Drehrichtung und Stärke der Rotation werden allein durch die azimutale Feldgeometrie der C‑Magnete bestimmt.
