Einleitung: Die Ausgangsbeobachtung
Zu Beginn der Untersuchungen zeigte sich ein einfaches, aber bemerkenswert stabiles Verhalten: Wenn alle C‑Magnete und alle B‑Magnete vertikal anziehend zueinander ausgerichtet waren, rotierten die B‑Magnete unter jedem C‑Magneten in derselben Richtung wie der Drehteller, der die obere Etage führt.
Dieses Verhalten war reproduzierbar und bildete die Grundlage für alle weiteren Experimente.
Energetische Einordnung: Für die Bewegung eines einzelnen oder vieler fixierter C‑Magnete, die auf einer Kreisbahn geführt werden, wird elektrische Energie benötigt, da – gemäß dem hier vorgestellten Modell – der Drehteller aktiv angetrieben werden muss. Die Rotation der B‑Magnete unter ihren jeweiligen Partner‑C‑Magneten (dem B‑C‑Leitpaar) um ihre vertikale Dipolachse benötigt jedoch keine externe Energiezufuhr. Sie entsteht aus der Umlenkung blockierter Ausrichtungsbewegungen innerhalb des magnetischen Feldes und bleibt vollständig durch die Feldgeometrie, die Polorientierung und die Vektorsumme der tangentialen Feldkomponenten bestimmt.
⭐ 1. Der Drehteller ist nicht die Ursache der Drehrichtung
Obwohl der Drehteller die C‑Etage bewegt, bestimmt er nicht die Drehrichtung der B‑Magnete. Er ist lediglich ein Transportmechanismus.
Die Drehrichtung der B‑Magnete entsteht nicht mechanisch, sondern rein feldgeometrisch.
Dies wird besonders deutlich, wenn die Polorientierungen verändert werden: Ein B‑Magnet kann stabil entgegengesetzt zur Drehtellerrichtung rotieren.
⭐ 2. Die Drehrichtung folgt der Vektorsumme der tangentialen Feldkomponenten
Im Basiszustand – nur der Leit‑C‑Magnet über B, alle Magnete vertikal anziehend – rotiert der B‑Magnet immer gleichsinnig zum Drehteller. Der Leit‑C‑Magnet erzeugt die Rotation und legt im Grundaufbau auch die Drehrichtung fest.
Sobald jedoch seitlich links, rechts oder über Eck ein zusätzlich anders gepolter C‑Magnet positioniert wird, entsteht eine zusätzliche tangentiale Feldkomponente, die die Drehrichtung beeinflussen kann.
Damit existieren zwei Regime:
Basiszustand (keine umgepolten Nachbarn):
Der B‑Magnet folgt der Drehtellerrichtung.
Steuerzustand (mindestens ein seitlicher, umgepolter C‑Magnet):
Die tangentialen Feldkomponenten der seitlichen Magnete dominieren und legen die Drehrichtung fest.
Kurz gesagt:
- Basiszustand: B folgt dem Drehteller.
- Steuerzustand: Die tangentiale Feldvektorsumme bestimmt die Drehrichtung.
- Die Drehtellerrichtung spielt dann keine Rolle mehr.
- Die Drehrichtung ist vektorbestimmt, nicht kraftbestimmt.
⭐ 3. Ein einzelner umgekehrt gepolter C‑Magnet reicht aus
Eine der wichtigsten Erkenntnisse des Tages lautet:
Ein einzelner zusätzlich positionierter C‑Magnet mit entgegengesetzter Polorientierung, der links oder rechts neben dem C‑B‑Leitmagneten angeordnet wird, genügt bereits, um die Drehrichtung der horizontalen Rotation des B‑Magneten um seine vertikale Dipolachse auf seiner Bahn umzukehren oder eindeutig festzulegen.
Werden zwei solcher entgegengesetzt gepolten C‑Magnete hinzugefügt, erhöht sich die Drehgeschwindigkeit des B‑Magneten entsprechend, da die resultierende tangentiale Feldkomponente verstärkt wird.
Dies gilt selbst dann, wenn:
- der Drehteller links dreht
- der primäre Anziehungsmagnet C‑3 eine Linksdrehung erwarten ließe
Ein einzelner umgekehrt gepolter Magnet (z. B. C‑2 oder C‑4) kann die Drehrichtung von B‑3 dennoch vollständig umkehren.
Das System ist also nicht mehrheitsabhängig, sondern vektorabhängig.
⭐ 4. Austauschbarkeit und Stabilität: C‑2 und C‑4 wirken gleichwertig
Die Experimente zeigten:
- Entfernt man C‑2 → B‑3 dreht weiterhin rechts.
- Entfernt man C‑4 → B‑3 dreht ebenfalls weiterhin rechts.
Das bedeutet:
C‑2 und C‑4 sind austauschbar. Ein einziger von beiden genügt, um die Drehrichtung stabil festzulegen.
Die Drehrichtung hängt also nicht an einem bestimmten Magneten, sondern an der Gesamtfeldgeometrie, die durch mindestens einen dominanten tangentialen Feldvektor erzeugt wird.
Dies ist ein Zeichen für topologische Stabilität.
⭐ 5. Verbindung zur Grundformel der Rotationsauslösung
Die heute beobachteten Drehrichtungsphänomene fügen sich nahtlos in meine bereits bestehende Grundformel ein:
mit
und
Diese Formel beschreibt:
- die Umlenkung der blockierten Reaktion
- die resultierende Rotation
- die Richtung der Rotation
- die Kopplung zwischen Bewegung und Rotation
Die neue Feldvektorformel ergänzt diese Grundformel perfekt, indem sie die Drehrichtung präzise erklärt.
⭐ 6. Ergänzung aus der Bildbeobachtung
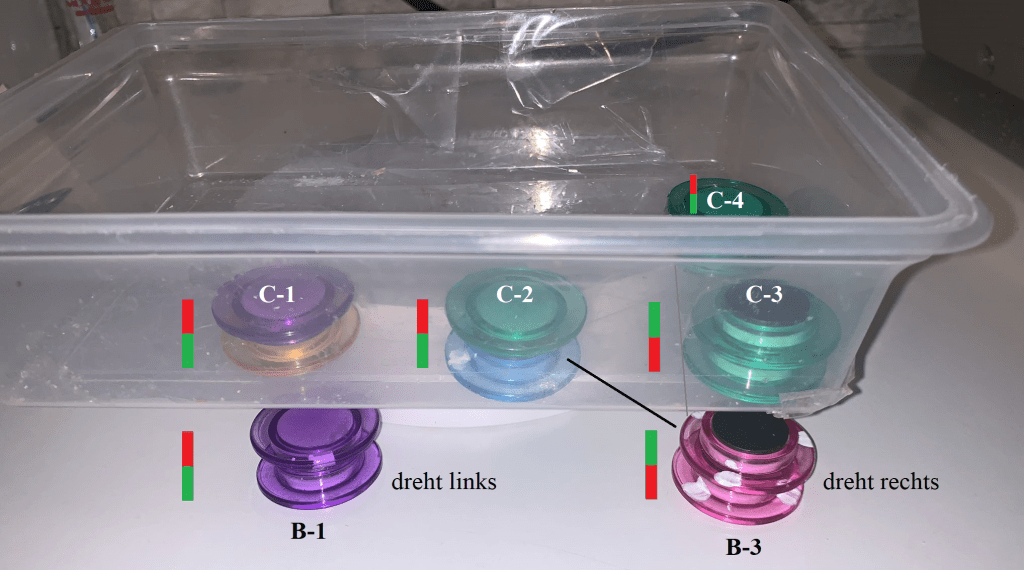
Die experimentelle Situation lässt sich so zusammenfassen:
- B‑1 ist anders gepolt als B‑3.
- C‑1 zieht B‑1 an → B‑1 dreht links, also gleichsinnig zum Drehteller.
- C‑3 zieht B‑3 an → B‑3 würde ebenfalls links drehen, wenn keine weiteren Magnete beteiligt wären.
- C‑2 und C‑4 erzeugen jedoch zusätzliche tangentiale Feldkomponenten → B‑3 dreht rechts.
- Entfernt man C‑2 → B‑3 dreht weiterhin rechts.
- Entfernt man C‑4 → B‑3 dreht ebenfalls weiterhin rechts.
- Fügt man C‑4 hinzu → die Rechtsrotation wird verstärkt.
Diese Beobachtungen bestätigen die Formel:
⭐ 7. Schlussgedanke
Die heutige Arbeit zeigt ein System, das sich nicht mechanisch, sondern gesetzmäßig verhält — ein System, das durch die Blockierung seiner natürlichen Reaktion (Kippen oder Polsprung) in eine alternative Bewegung gezwungen wird: die Rotation.
Und diese Rotation folgt:
- der Feldgeometrie,
- der Polorientierung,
- der Neigung,
- der Position,
- und der Vektorsumme aller beteiligten Magnete.
Damit ist die Drehrichtung vollständig erklärbar.
